Public PhD defense - Reinforcement Learning for Real-World Robots Denis Steckelmacher 1:49:50 Streamed 3 years ago 729 Скачать Далее
Provably Safe Learning-Based Robot Control (Alec Farid, PhD Defense) Intelligent Robot Motion Lab 1:12:02 1 year ago 1 219 Скачать Далее
Learning Robot Control: From RL to Differential Simulation - (PhD Defense of Yunlong Song) UZH Robotics and Perception Group 24:32 1 month ago 4 152 Скачать Далее
Real-World Humanoid Locomotion with Reinforcement Learning Hybrid Robotics 0:32 7 months ago 2 559 Скачать Далее
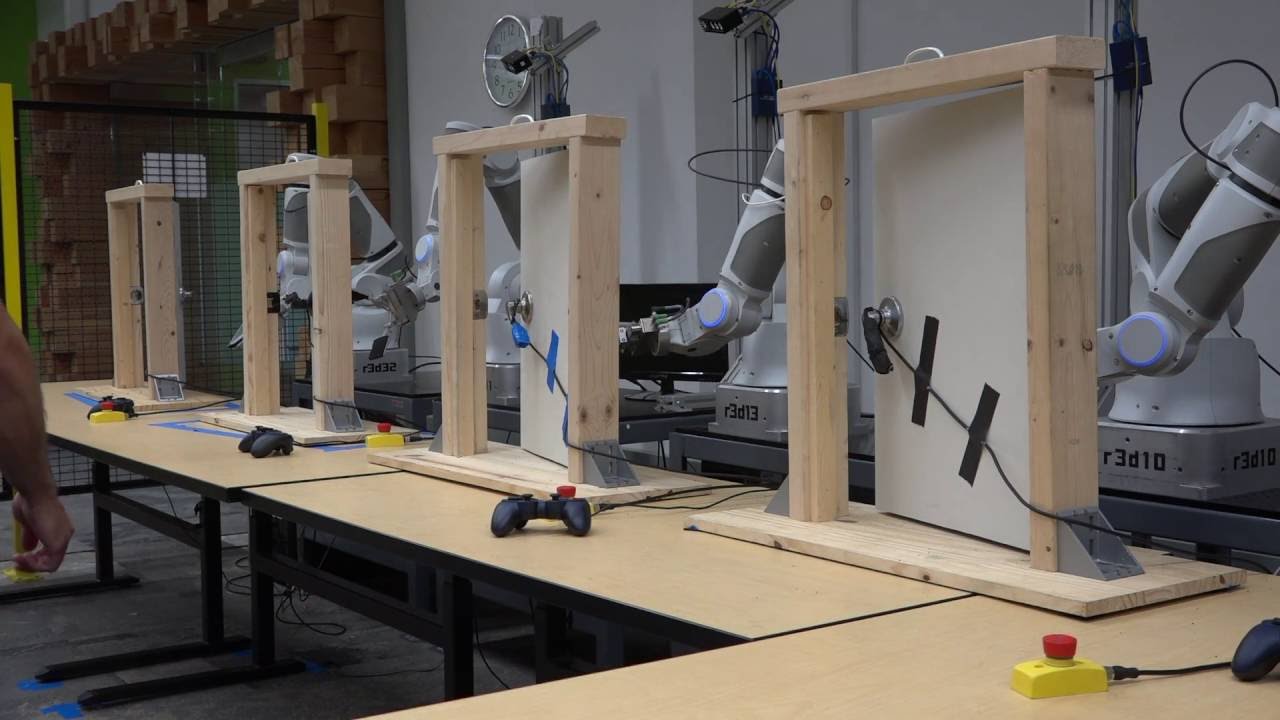
Collective Robot Reinforcement Learning, Human Demonstration Ali Yahya 0:28 7 years ago 23 006 Скачать Далее
Deep Reinforcement Learning Based Robot Arm Manipulation – Real-world Experiment Control Lab KAIST 1:09 5 years ago 6 106 Скачать Далее
RealAnt robot takes reinforcement learning to the real world Aalto University 3:42 8 months ago 768 Скачать Далее
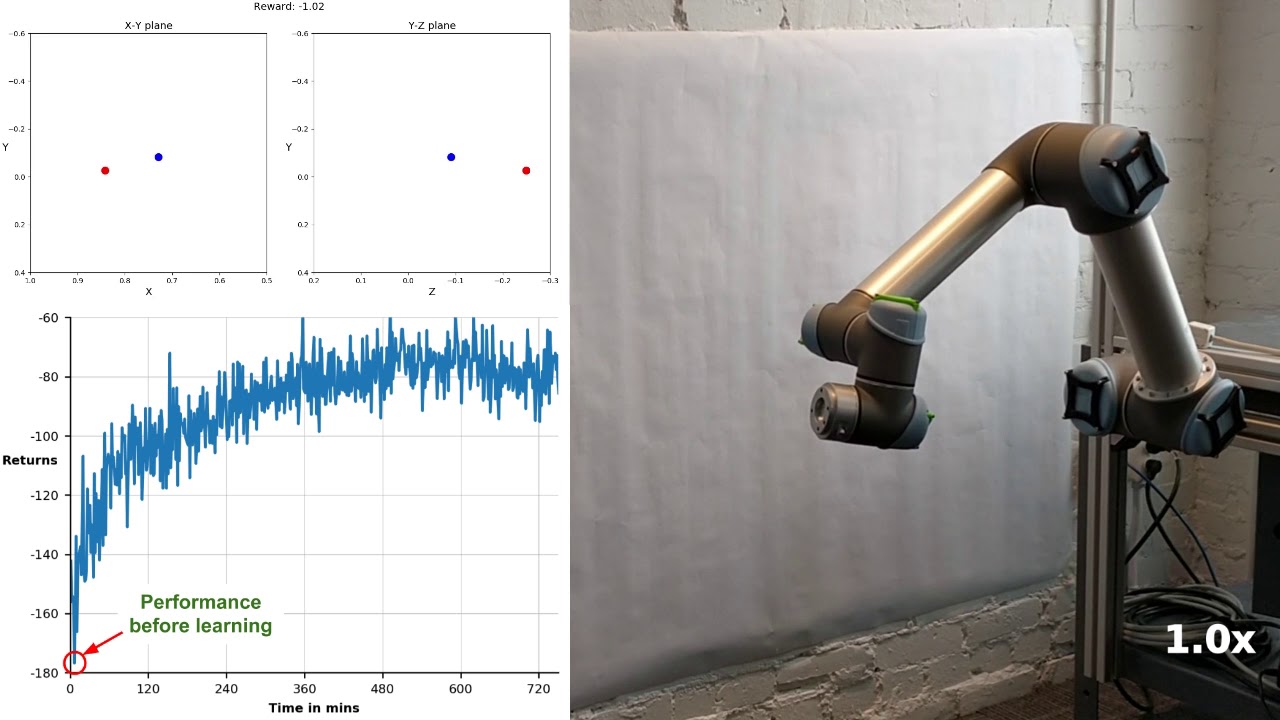
Setting up a Reinforcement Learning Task with a Real-World Robot Kindred AI 1:41 6 years ago 28 057 Скачать Далее
Real World Reinforcement Learning with the Thing UTIAS STARS Laboratory 1:53 5 years ago 863 Скачать Далее
Real-World Human-Robot Collaborative Reinforcement Learning Ali Shafti 2:40 4 years ago 225 Скачать Далее
Benchmarking Reinforcement Learning Algorithms on Real-World Robots Kindred AI 8:18 5 years ago 2 302 Скачать Далее
Collective Robot Reinforcement Learning, Training Phase Ali Yahya 0:39 7 years ago 17 070 Скачать Далее
Deep Reinforcement Learning in the Real World -Sergey Levine Institute for Advanced Study 46:23 4 years ago 8 982 Скачать Далее
Virtual PhD Defense of Steven Jens Jorgensen UT Human Centered Robotics Lab 1:00:23 4 years ago 1 500 Скачать Далее